
مشارکت های نویسنده
مفهوم سازی، ND و KM. روش شناسی، ND; نرم افزار، ND; اعتبار سنجی، ND; تجزیه و تحلیل رسمی، ND و KM. تحقیق، ND و KM. منابع، KM; گزینش داده، ND; نوشتن – آماده سازی پیش نویس اصلی، ND; نوشتن-بررسی و ویرایش، ND و KM. تجسم، ND; نظارت، KM; مدیریت پروژه، KM; کسب بودجه، KM همه نویسندگان نسخه منتشر شده نسخه خطی را خوانده و با آن موافقت کرده اند.
۷ ابزار جراحی مورد استفاده در مجموعه داده Cholec80 [1].
۷ ابزار جراحی مورد استفاده در مجموعه داده Cholec80 [1].
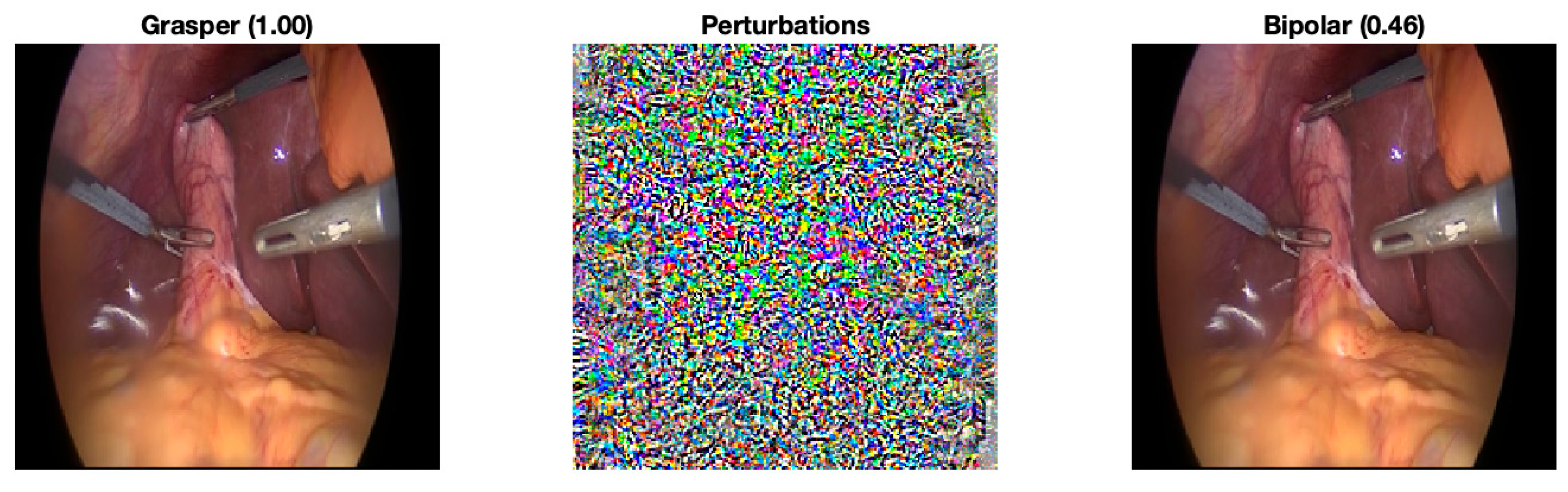
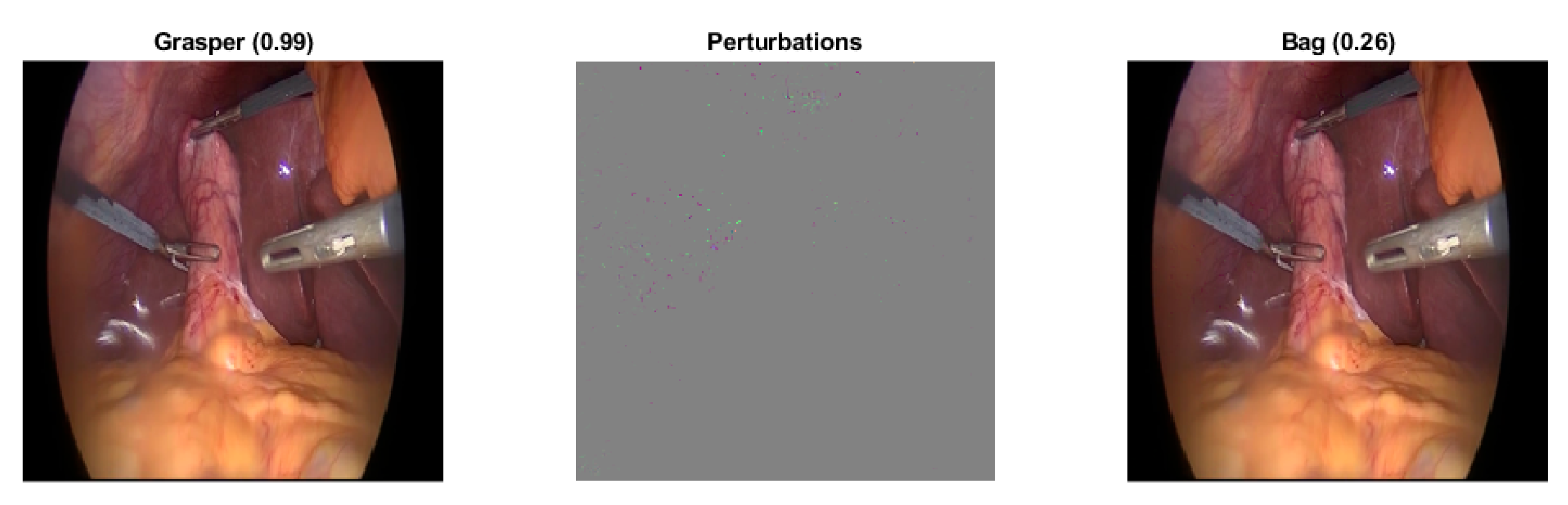
یک تصویر را از Grasper (کلاس ۱) به Bipolar (کلاس ۲) با روش علامت گرادیان سریع (FGSM) تغییر دهید. حریف (راست) با کمترین اغتشاش دقیقاً زمانی ایجاد شد که طبقه بندی تغییر کرد.
شکل ۲٫
یک تصویر را از Grasper (کلاس ۱) به Bipolar (کلاس ۲) با روش علامت گرادیان سریع (FGSM) تغییر دهید. حریف (راست) با کمترین اغتشاش دقیقاً زمانی ایجاد شد که طبقه بندی تغییر کرد.
اصلاح هدفمند یک تصویر از Grasper (کلاس اصلی yاصل و نسب) به Bipolar (کلاس هدف yهدف) با اندازه گام ثابت ۰٫۱٫ از دست دادن طبقه بندی هدف و احتمال کلاس اصلی در حال کاهش است در حالی که احتمال کلاس هدف در حال افزایش است. زوایای θn در محور تلفات در توابع مثلثاتی برای توصیف وضعیت تلفات استفاده می شود.
شکل ۳٫
اصلاح هدفمند یک تصویر از Grasper (کلاس اصلی yاصل و نسب) به Bipolar (کلاس هدف yهدف) با اندازه گام ثابت ۰٫۱٫ از دست دادن طبقه بندی هدف و احتمال کلاس اصلی در حال کاهش است در حالی که احتمال کلاس هدف در حال افزایش است. زوایای θn در محور تلفات در توابع مثلثاتی برای توصیف وضعیت تلفات استفاده می شود.

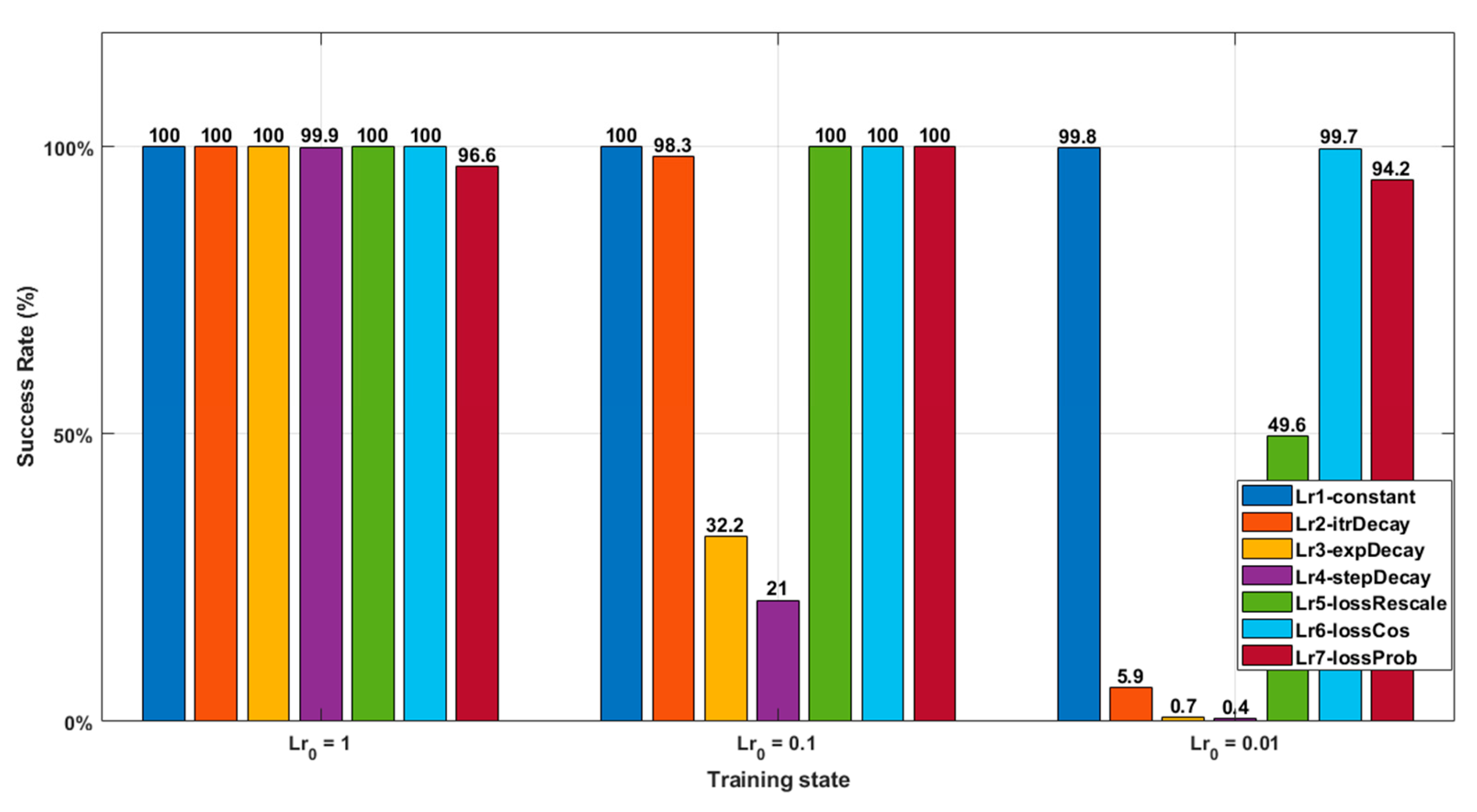
میزان موفقیت برای رسیدن به یک طبقه بندی اشتباه هدف در ۱۰۰ تکرار. توابع فروپاشی به ترتیب عبارتند از ثابت، واپاشی تکرار، واپاشی نمایی، و فروپاشی گام. ۳ تابع واپاشی آخر که با از دست دادن تغییر می کنند، تابع مقیاس مجدد، تابع مثلثاتی و احتمال طبقه بندی اصلی هستند.
شکل ۴٫
میزان موفقیت برای رسیدن به یک طبقه بندی اشتباه هدف در ۱۰۰ تکرار. توابع فروپاشی به ترتیب عبارتند از ثابت، واپاشی تکرار، واپاشی نمایی، و فروپاشی گام. ۳ تابع واپاشی آخر که با از دست دادن تغییر می کنند، تابع مقیاس مجدد، تابع مثلثاتی و احتمال طبقه بندی اصلی هستند.
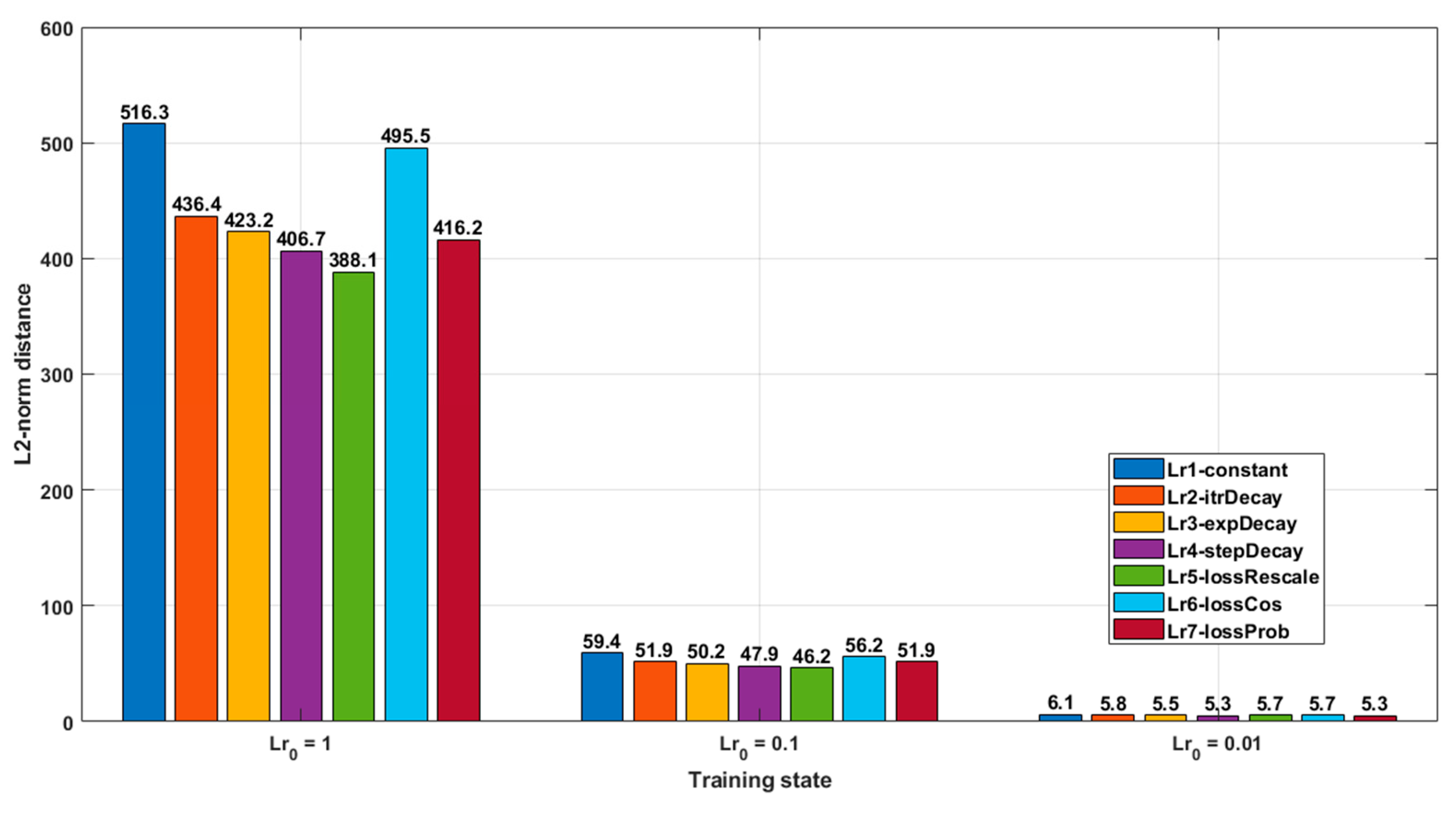
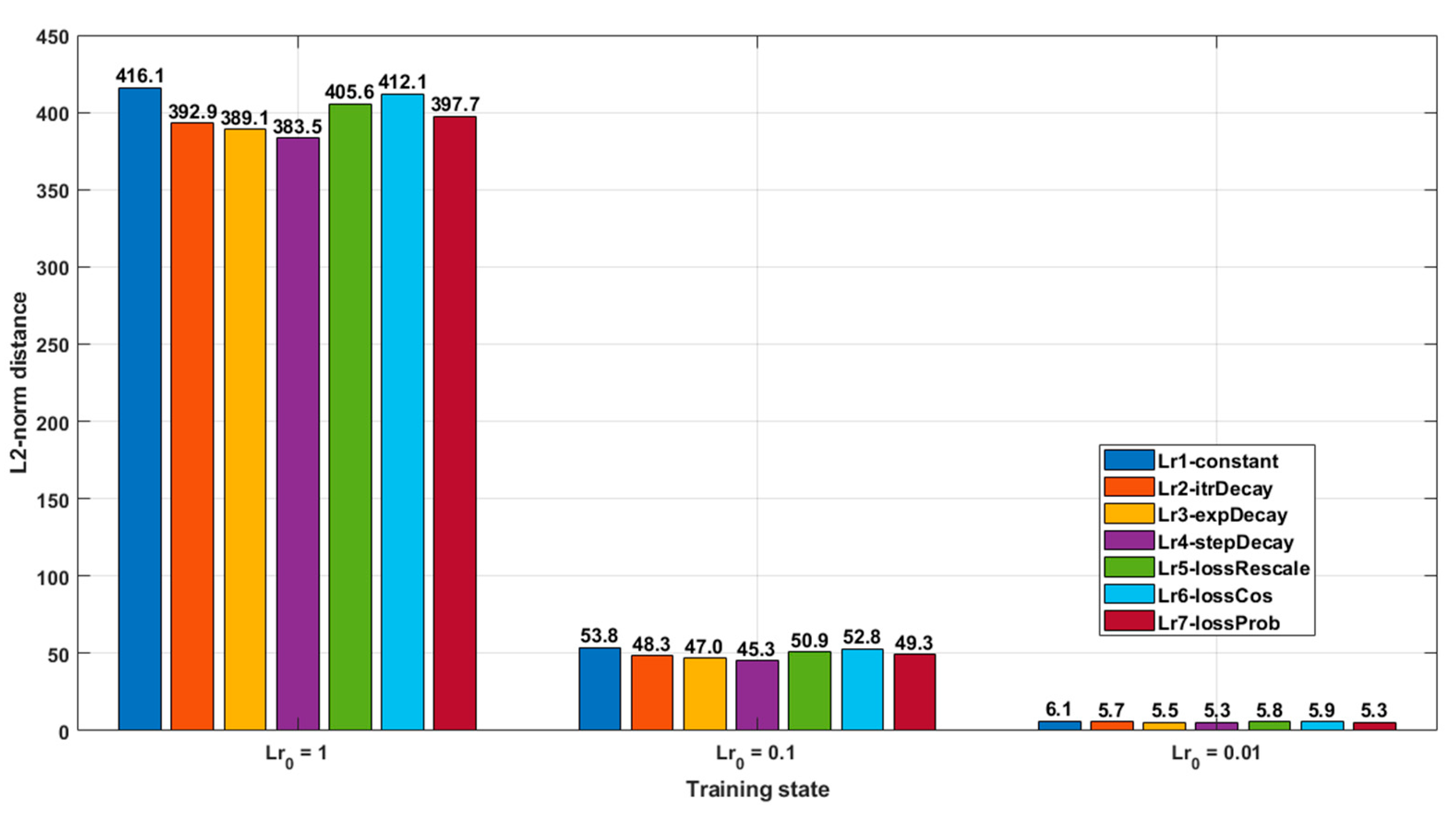
کوچکترین اختلال ایجاد شده توسط الگوریتم های فروپاشی تطبیقی مختلف در حمله دشمن هدف. محاسبه فقط بر اساس موارد موفق مشترک (با = ۱، ۰٫۱، ۰٫۰۱; تعداد موارد موفق مشترک به ترتیب ۸۱۰۴، ۱۷۶۸ و ۳۷ مورد است. توابع فروپاشی، به ترتیب، ثابت، واپاشی تکرار، واپاشی نمایی، و فروپاشی پله هستند. ۳ تابع واپاشی آخر که به از دست دادن بستگی دارند عبارتند از تابع مقیاس مجدد، تابع مثلثاتی و احتمال طبقه بندی اصلی.
شکل ۵٫
کوچکترین اختلال ایجاد شده توسط الگوریتم های فروپاشی تطبیقی مختلف در حمله دشمن هدف. محاسبه فقط بر اساس موارد موفق مشترک (با = ۱، ۰٫۱، ۰٫۰۱; تعداد موارد موفق مشترک به ترتیب ۸۱۰۴، ۱۷۶۸ و ۳۷ مورد است. توابع فروپاشی، به ترتیب، ثابت، واپاشی تکرار، واپاشی نمایی، و فروپاشی پله هستند. ۳ تابع واپاشی آخر که به از دست دادن بستگی دارند عبارتند از تابع مقیاس مجدد، تابع مثلثاتی و احتمال طبقه بندی اصلی.
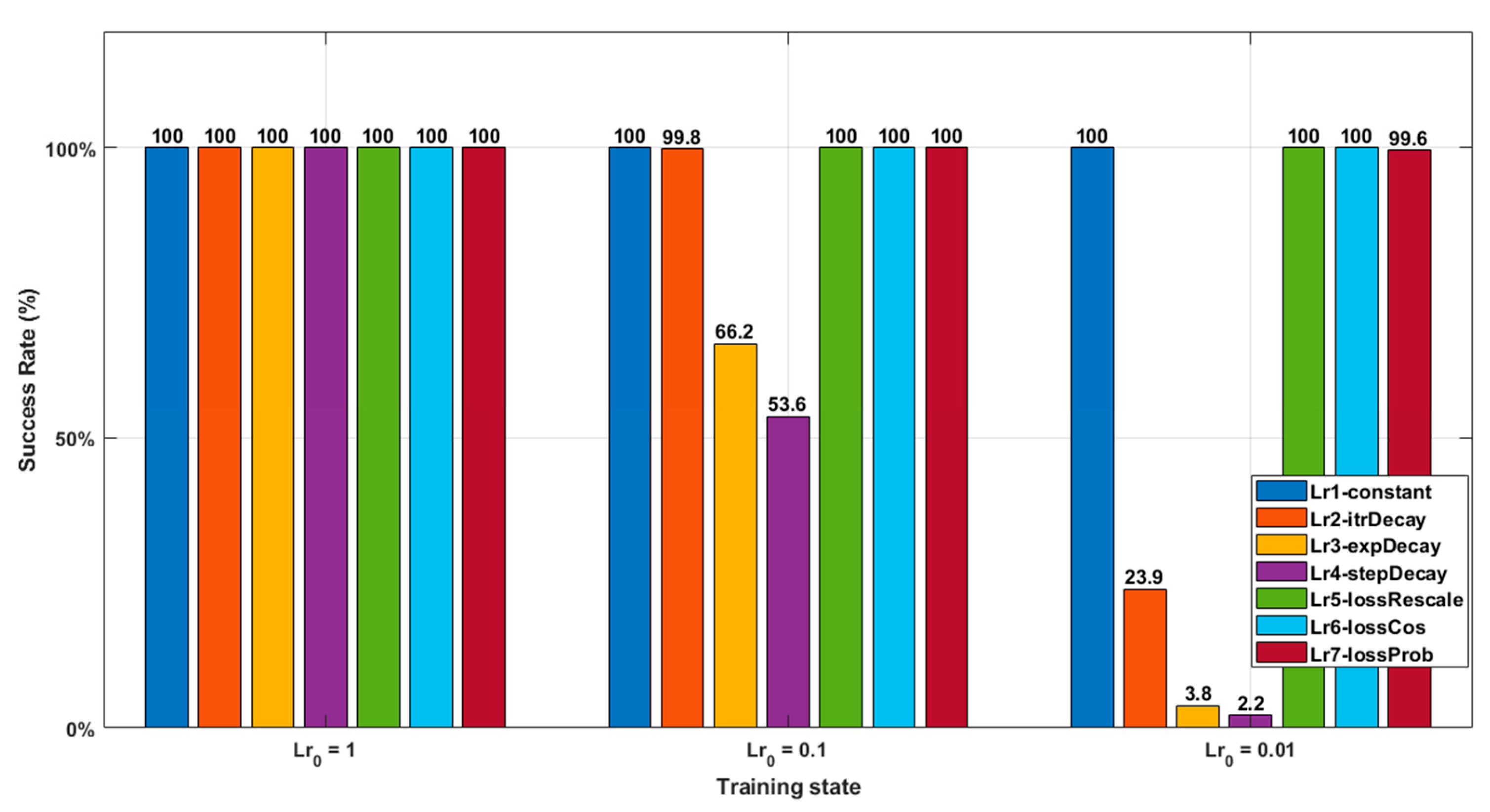
میزان موفقیت برای رسیدن به طبقهبندی اشتباه غیرهدف در ۱۰۰ تکرار. توابع فروپاشی به ترتیب عبارتند از ثابت، واپاشی تکرار، واپاشی نمایی، و فروپاشی گام. ۳ تابع واپاشی آخر که به از دست دادن بستگی دارند عبارتند از تابع مقیاس مجدد، تابع مثلثاتی و احتمال طبقه بندی اصلی.
شکل ۶٫
میزان موفقیت برای رسیدن به طبقهبندی اشتباه غیرهدف در ۱۰۰ تکرار. توابع فروپاشی به ترتیب عبارتند از ثابت، واپاشی تکرار، واپاشی نمایی، و فروپاشی گام. ۳ تابع واپاشی آخر که به از دست دادن بستگی دارند عبارتند از تابع مقیاس مجدد، تابع مثلثاتی و احتمال طبقه بندی اصلی.
کوچکترین اختلال ایجاد شده توسط الگوریتم های فروپاشی تطبیقی مختلف در حمله خصمانه غیر هدف. محاسبه فقط بر اساس موارد موفق مشترک (با = ۱، ۰٫۱، ۰٫۰۱; تعداد موارد موفقیت مشترک به ترتیب ۱۴۰۰، ۷۵۱ و ۳۱ است. در مجموع، ۱۴۰۰ مورد در حمله خصمانه غیر هدف وجود دارد). ۷ تابع واپاشی به ترتیب زیر فهرست شده اند: ثابت، واپاشی تکرار، واپاشی نمایی، و فروپاشی گام. تابع مقیاس مجدد، تابع مثلثاتی، و احتمال طبقه بندی اصلی. ۳ تابع واپاشی آخر همگی به از دست دادن بستگی دارند.
شکل ۷٫
کوچکترین اختلال ایجاد شده توسط الگوریتم های فروپاشی تطبیقی مختلف در حمله خصمانه غیر هدف. محاسبه فقط بر اساس موارد موفق مشترک (با = ۱، ۰٫۱، ۰٫۰۱; تعداد موارد موفقیت مشترک به ترتیب ۱۴۰۰، ۷۵۱ و ۳۱ است. در مجموع، ۱۴۰۰ مورد در حمله خصمانه غیر هدف وجود دارد). ۷ تابع واپاشی به ترتیب زیر فهرست شده اند: ثابت، واپاشی تکرار، واپاشی نمایی، و فروپاشی گام. تابع مقیاس مجدد، تابع مثلثاتی، و احتمال طبقه بندی اصلی. ۳ تابع واپاشی آخر همگی به از دست دادن بستگی دارند.
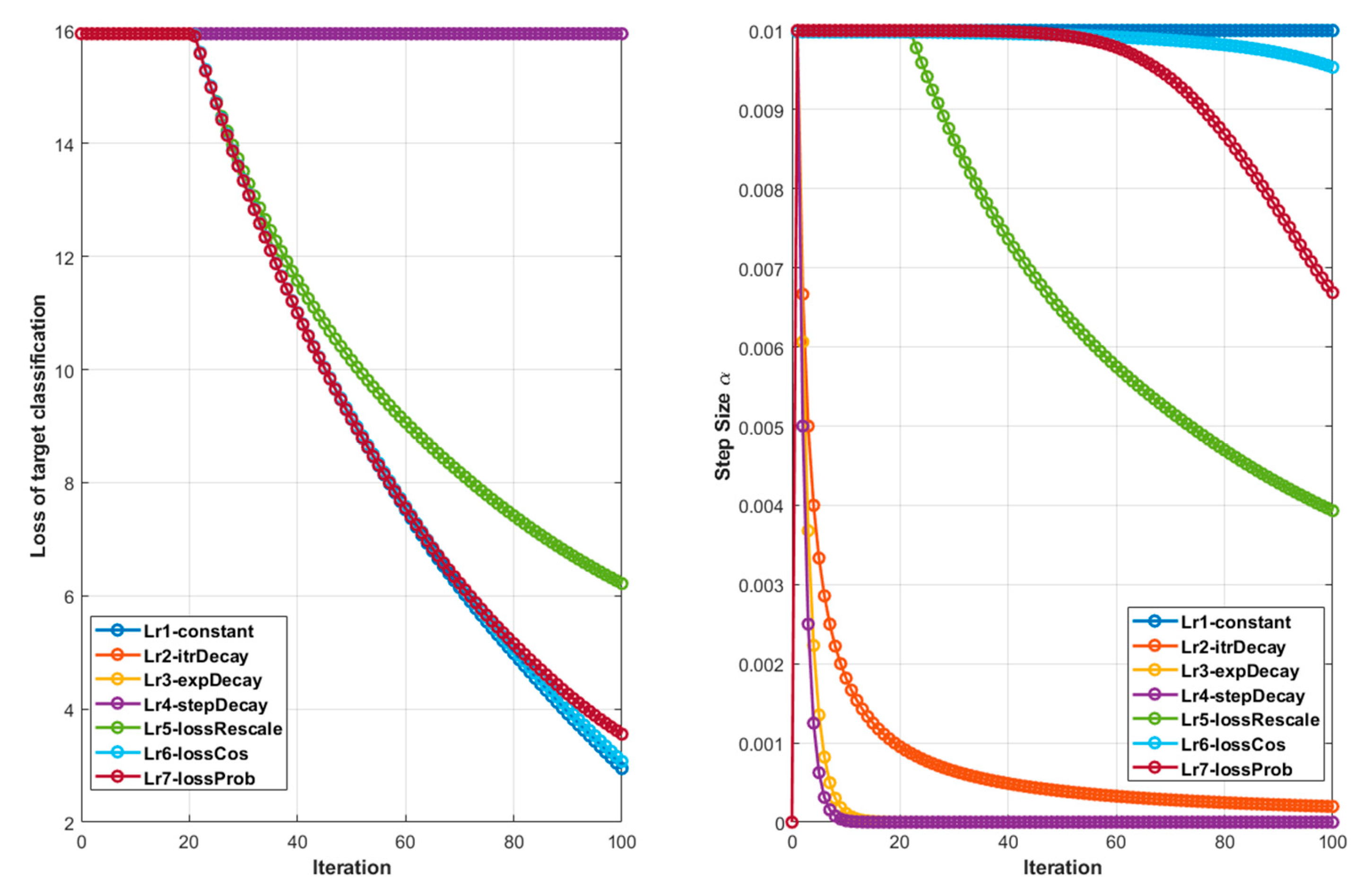
یک تصویر مثال که نتوانست طبقهبندی هدف را در ۱۰۰ تکرار بدست آورد (اندازه مرحله اولیه ۰٫۰۱، کلاس اصلی ۱، کلاس هدف ۳ است). محور سمت چپ نشان دهنده روند از دست دادن طبقه بندی هدف است، و محور سمت راست نشان دهنده اندازه گام در حال فروپاشی است.
شکل ۸٫
یک تصویر مثال که نتوانست طبقهبندی هدف را در ۱۰۰ تکرار بدست آورد (اندازه مرحله اولیه ۰٫۰۱، کلاس اصلی ۱، کلاس هدف ۳ است). محور سمت چپ نشان دهنده روند از دست دادن طبقه بندی هدف است، و محور سمت راست نشان دهنده اندازه گام در حال فروپاشی است.
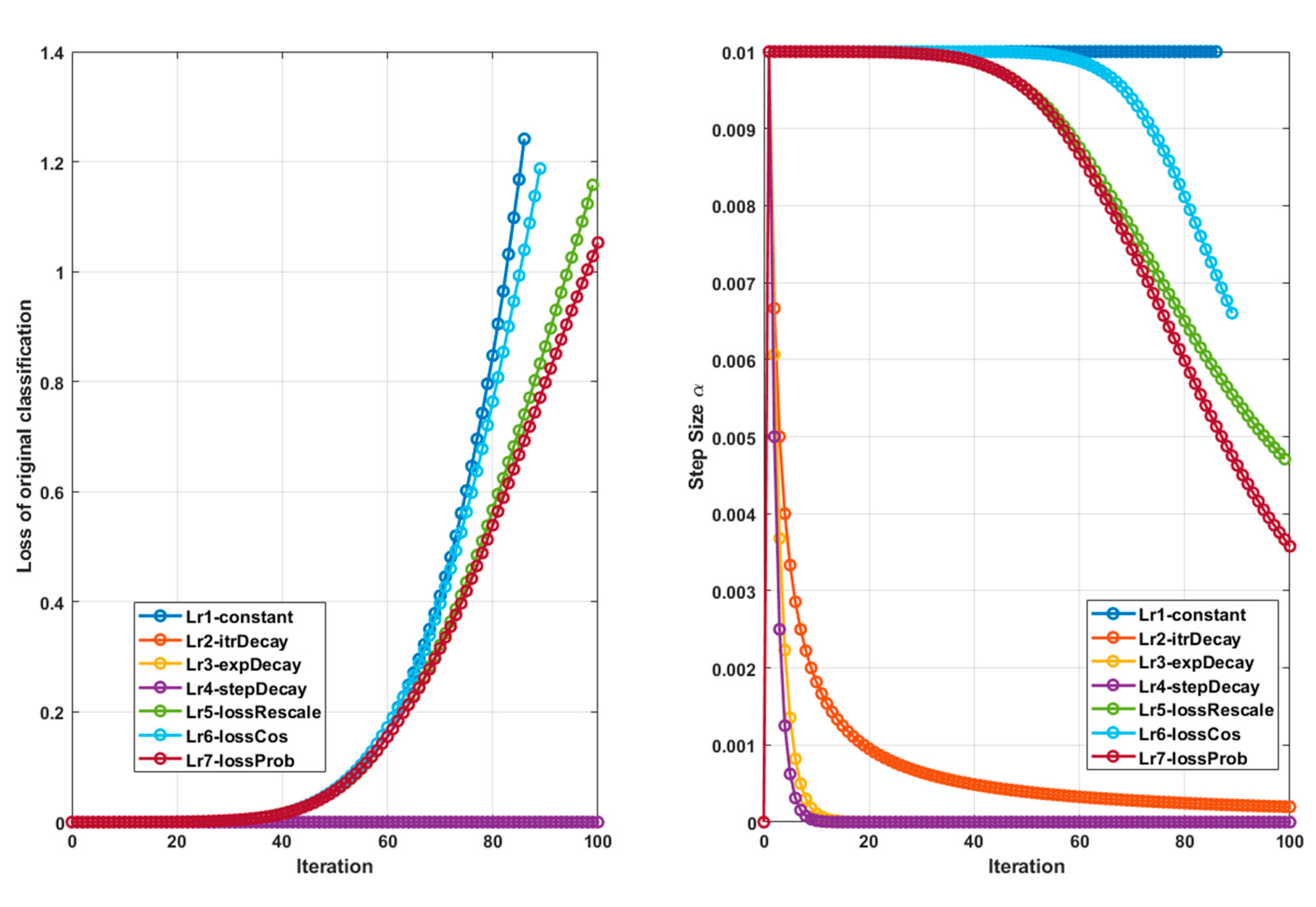
یک تصویر دشوار برای یافتن طبقهبندی اشتباه غیرهدف در ۱۰۰ تکرار (اندازه مرحله اولیه ۰٫۰۱، کلاس اصلی ۳ است؛ تنها اولین ثابت، پنجمین تابع تغییر مقیاس از دست دادن، و تابع مثلثاتی ۶ به ترتیب در ۸۶، ۹۹، و ۸۹ تکرار موفق هستند. ). محور سمت چپ نشان دهنده روند از دست دادن طبقه بندی اصلی است، و محور سمت راست نشان دهنده اندازه گام رو به زوال است.
شکل ۹٫
یک تصویر دشوار برای یافتن طبقهبندی اشتباه غیرهدف در ۱۰۰ تکرار (اندازه مرحله اولیه ۰٫۰۱، کلاس اصلی ۳ است؛ فقط اولین ثابت، پنجمین تابع تغییر مقیاس از دست دادن، و تابع مثلثاتی ۶ به ترتیب در ۸۶، ۹۹، و ۸۹ تکرار موفق هستند. ). محور سمت چپ نشان دهنده روند از دست دادن طبقه بندی اصلی است، و محور سمت راست نشان دهنده اندازه گام رو به زوال است.
دشمن غیر هدف به تصویری از Grasper (کلاس ۱) با i-FGSM حمله می کند (اندازه مرحله اولیه ۱ است، با تابع مثلثاتی ششم برای کاهش اندازه گام استفاده می شود) در حالی که فقط ۱۰۰ پیکسل بالا را با گرادیان های بزرگتر در هر تکرار اصلاح می کند. . همانطور که اغتشاش نهایی نشان می دهد، تنها ۱٫۲٪ از تصویر اصلاح شده است، اما این هنوز برای تغییر طبقه بندی کافی است.
شکل ۱۰٫
دشمن غیر هدف به تصویری از Grasper (کلاس ۱) با i-FGSM حمله می کند (اندازه مرحله اولیه ۱ است، با تابع مثلثاتی ششم برای کاهش اندازه گام استفاده می شود) در حالی که فقط ۱۰۰ پیکسل بالا را با گرادیان های بزرگتر در هر تکرار اصلاح می کند. . همانطور که اغتشاش نهایی نشان می دهد، تنها ۱٫۲٪ از تصویر اصلاح شده است، اما این هنوز برای تغییر طبقه بندی کافی است.
میز ۱٫
شاخص کلاس، ابزار جراحی مربوطه، و تعداد فریمها در مجموعه دادههای کلاس ۱ مشتقشده.
میز ۱٫
شاخص کلاس، ابزار جراحی مربوطه، و تعداد فریمها در مجموعه دادههای کلاس ۱ مشتقشده.
| کلاس | ابزار جراحی | تعداد فریم ها |
|---|---|---|
| ۱ | گراسپر | ۲۳,۵۰۷ |
| ۲ | دوقطبی | ۳۲۲۲ |
| ۳ | قلاب | ۴۴,۸۸۷ |
| ۴ | قیچی | ۱۴۸۳ |
| ۵ | کلیپر | ۲۶۴۷ |
| ۶ | آبیاری | ۲۸۹۹ |
| ۷ | کیسه | ۱۵۴۵ |
جدول ۲٫
توابع فروپاشی مورد استفاده در این مقاله. جایی که به ترتیب اندازه گام، اندازه گام اولیه و تکرار را نشان می دهد.
جدول ۲٫
توابع فروپاشی مورد استفاده در این مقاله. جایی که به ترتیب اندازه گام، اندازه گام اولیه و تکرار را نشان می دهد.
| فهرست مطالب | الگوریتم های فروپاشی | تشکیل می دهد |
|---|---|---|
| ۱ | ثابت | |
| ۲ | فروپاشی تکرار | |
| ۳ | فروپاشی نمایی | |
| ۴ | پوسیدگی پله | |
| ۵ | مقیاس های ضرر | |
| ۶ | مثلثاتی از دست دادن | |
| ۷ | احتمال از دست دادن |
جدول ۳٫
نزدیکترین منطقه طبقهبندی متخاصم هنگام ایجاد دشمن توسط ششمین (تابع مثلثاتی از دست دادن) در حمله خصمانه غیر هدف.
جدول ۳٫
نزدیکترین منطقه طبقهبندی متخاصم هنگام ایجاد دشمن توسط ششمین (تابع مثلثاتی از دست دادن) در حمله خصمانه غیر هدف.
| کلاس نهایی با حداکثر درصد | |||
|---|---|---|---|
| کلاس مبدا | |||
| ۱ | ۷-(۳۰٫۵%) | ۷-(۳۰٫۵%) | ۷-(۳۱٫۰%) |
| ۲ | ۱-(۶۰٫۵%) | ۱-(۶۱٫۰%) | ۱-(۶۰٫۵%) |
| ۳ | ۱-(۶۹٫۰%) | ۱-(۶۴٫۵%) | ۱-(۶۴٫۵%) |
| ۴ | ۱-(۴۲٫۰%) | ۱-(۴۳٫۵%) | ۱-(۴۴٫۰%) |
| ۵ | ۱-(۵۱٫۵%) | ۱-(۴۶٫۰%) | ۱-(۴۶٫۵%) |
| ۶ | ۱-(۴۵٫۰%) | ۱-(۴۴٫۵%) | ۱-(۴۳٫۵%) |
| ۷ | ۱-(۷۷٫۵%) | ۱-(۷۸٫۵%) | ۱-(۷۸٫۵%) |
جدول ۴٫
تعداد مواردی که برای یافتن حریف فقط به یک تکرار نیاز دارند.
جدول ۴٫
تعداد مواردی که برای یافتن حریف فقط به یک تکرار نیاز دارند.
| الگوریتم های فروپاشی | حمله هدف | حمله غیر هدف | ||||
|---|---|---|---|---|---|---|
| ثابت اول | ۲۶۲۱ | ۴۵۳ | ۱۰ | ۱۰۵۰ | ۳۱۷ | ۹ |
| پوسیدگی تکرار ۲ | ۲۶۲۱ | ۴۵۳ | ۱۰ | ۱۰۵۰ | ۳۱۷ | ۹ |
| ۳ فروپاشی نمایی | ۲۶۲۱ | ۴۵۳ | ۱۰ | ۱۰۵۰ | ۳۱۷ | ۹ |
| پوسیدگی مرحله چهارم | ۲۶۲۱ | ۴۵۳ | ۱۰ | ۱۰۵۰ | ۳۱۷ | ۹ |
| پنجمین مقیاس ضرر | ۲۶۲۱ | ۴۵۳ | ۱۰ | ۱۰۵۰ | ۳۱۷ | ۹ |
| مثلثات باخت ششم | ۲۶۱۷ | ۴۴۷ | ۱۰ | ۱۰۵۰ | ۳۱۷ | ۹ |
| احتمال باخت هفتم | ۲۶۰۸ | ۴۳۴ | ۶ | ۱۰۵۰ | ۳۱۳ | ۶ |
جدول ۵٫
آستانههای متفاوتی که برای فیلتر کردن پیکسلهای با گرادیان بزرگتر استفاده میشوند، بر آشفتگیهای نهایی تأثیر میگذارند که میتواند طبقهبندی مدل را تغییر دهد.
جدول ۵٫
آستانههای متفاوتی که برای فیلتر کردن پیکسلهای با گرادیان بزرگتر استفاده میشوند، بر آشفتگیهای نهایی تأثیر میگذارند که میتواند طبقهبندی مدل را تغییر دهد.
| آستانه | کلاس مبدا | کلاس نهایی | تکرار | L1-هنجار | L2-هنجار | اصلاح بخش |
|---|---|---|---|---|---|---|
| ۰ | ۱ | ۷ | ۲ | ۱۵٫۳۱ × ۱۰۴ | ۵۴۵٫۸۹ | ۹۹٫۵۵٪ |
| ۱/۲ | ۱ | ۴ | ۲ | ۶٫۷۰ x 104 | ۲۷۰٫۱۵ | ۴۹٫۳۰٪ |
| ۱/۴ | ۱ | ۴ | ۲ | ۲٫۸۲ × ۱۰۴ | ۱۸۱٫۲۱ | ۱۸٫۶۵٪ |
| ۵۰۰۰ پیکسل برتر | ۱ | ۴ | ۳ | ۱٫۲۵×۱۰۴ | ۱۲۷٫۶۱ | ۷٫۷۱٪ |
| ۵۰۰ پیکسل برتر | ۱ | ۴ | ۱۲ | ۵٫۰۰ x 103 | ۱۱۹٫۱۳ | ۲٫۰۴٪ |
| ۱۰۰ پیکسل برتر | ۱ | ۷ | ۵۵ | ۴٫۰۸ × ۱۰۳ | ۱۵۸٫۳۳ | ۱٫۱۸٪ |
منبع: https://www.mdpi.com/2673-2688/5/2/46